
目录
快速导航-

电动汽车稳定性控制及先进优化算法技术专题 | 考虑参数不确定性的分布式驱动电动汽车横向稳定性控制
电动汽车稳定性控制及先进优化算法技术专题 | 考虑参数不确定性的分布式驱动电动汽车横向稳定性控制
-
电动汽车稳定性控制及先进优化算法技术专题 | 基于离散滑模预测控制算法的分布式驱动电动汽车ARS和DYC协调控制
电动汽车稳定性控制及先进优化算法技术专题 | 基于离散滑模预测控制算法的分布式驱动电动汽车ARS和DYC协调控制
-

电动汽车稳定性控制及先进优化算法技术专题 | 基于G-FA优化的电动汽车轨迹跟踪及稳定性控制
电动汽车稳定性控制及先进优化算法技术专题 | 基于G-FA优化的电动汽车轨迹跟踪及稳定性控制
-
电动汽车稳定性控制及先进优化算法技术专题 | 基于脑电图和肌电图融合的单踏板控制系统紧急制动意图检测
电动汽车稳定性控制及先进优化算法技术专题 | 基于脑电图和肌电图融合的单踏板控制系统紧急制动意图检测
-
电动汽车稳定性控制及先进优化算法技术专题 | 汽车空气动力学标准模型在不同车身姿态下的气动升力研究
电动汽车稳定性控制及先进优化算法技术专题 | 汽车空气动力学标准模型在不同车身姿态下的气动升力研究
-
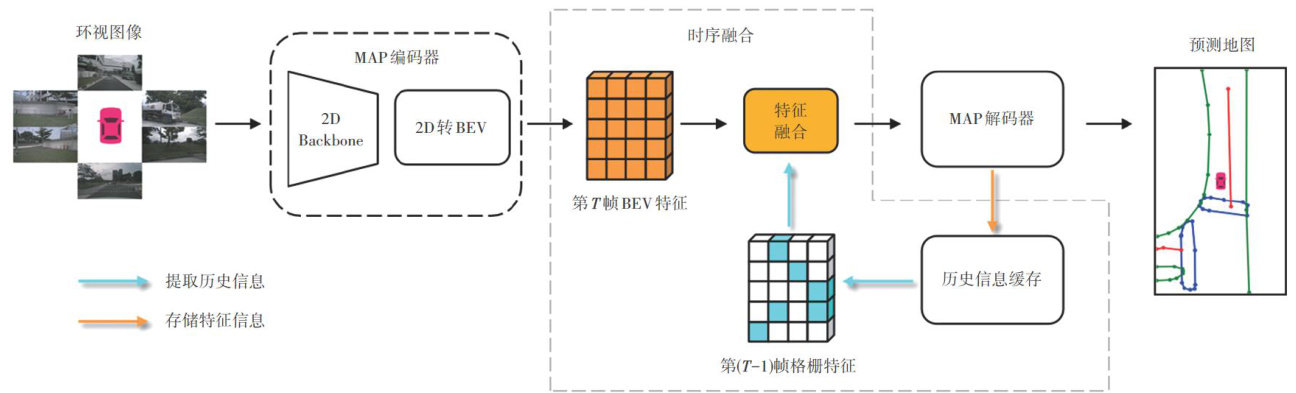
电动汽车稳定性控制及先进优化算法技术专题 | 基于时序信息融合的轻量高精地图在线构建方法
电动汽车稳定性控制及先进优化算法技术专题 | 基于时序信息融合的轻量高精地图在线构建方法
-
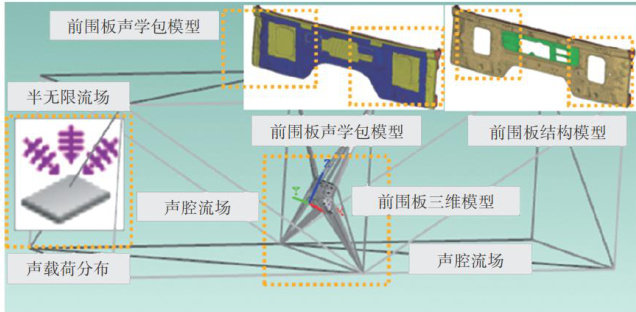
电动汽车稳定性控制及先进优化算法技术专题 | 统计能量中频扩展方法综述
电动汽车稳定性控制及先进优化算法技术专题 | 统计能量中频扩展方法综述













 登录
登录